 |
はじめに
数学の準備
高校数学
複素数
ラプラス変換
ラプラス逆変換
Scilab入門
概要
四則演算
配列
グラフ表示
プログラム1
プログラム2
伝達関数
概要
poly,syslin,csim
ステップ応答法
RLC回路
周波数応答
ゲイン・位相
ボード線図
比例・微分・積分
1次遅れ,ムダ時間
パデ近似の導出
pade関数の作成
制御の安定性
 ブロック線図
ブロック線図フィードバック
2次遅れ系
ステップ応答法
周波数応答法
ナイキスト線図
安定性の判別
判別の仕組み
安定余裕の評価
評価の例題
Xcos
入門
例・運動方程式
PID制御(Xcos)
概要
比例(P)動作
積分(I)動作
微分(D)動作
PID・ボード線図
制御の安定性:ブロック線図
自動制御系の中での信号伝達のありさまを表す方法にブロック線図があります。
ブロック線図の基本に関して見ていきます。
ブロック線図の基本
| 名称 | シンボル | 式 | 意味 |
| 伝達要素 | 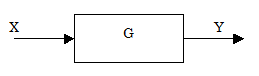 |
Y=GX | 出力Yは入力信号XのG倍になる 信号の流れる方向:矢印 入出力間の関係を表す要素:□ |
| 加え合わせ点 | 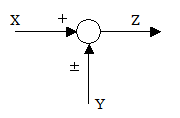 |
Z=X±Y | 入力信号XYが加算(減算)され、その結果がZ |
| 引き出し点 | 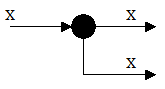 |
一つの信号を2つ上に分岐 |
これらのシンボルを組み合わせてブロック線図を作成していきます。
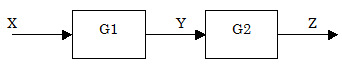
直列接続
| 変換前 | 変換後 |
 |
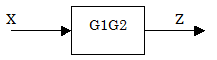 |
<Scilabでの表現>
G1・G2の伝達関数をそれぞれ
とした場合の変換後の伝達関数をScilabで求めます。
| コンソール画面 |
-->s=%s;
-->G1=1/(10*s^2);
-->G2=(s+1)/(s+2);
-->G=G1*G2 //←直列接続
G =
1 + s
---------
2 3
20s + 10s
|
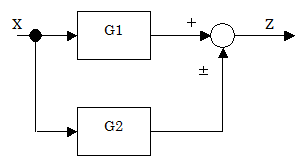
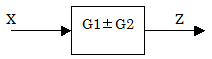
並列接続
| 変換前 | 変換後 |
 |
 |
<Scilabでの表現>
直列接続で使用した伝達関数を並列接続した場合の変換後をScilabで求めます。
| コンソール画面 |
-->G=G1+G2
G =
2 3
2 + s + 10s + 10s
-----------------
2 3
20s + 10s
|
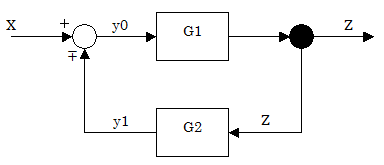
フィードバック接続
| 変換前 | 変換後 |
 |
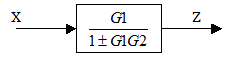 |
加え合わせ点がマイナスのとき、各点の伝達関数は次式になります。
y0 = X - y1…(1)
y1 = Z・G2…(2)
Z = y0・G1…(3)
(2)式の y1 を(1)式へ代入、その(1)式の y0 を(3)式へ代入すれば
Z = (X-Z・G2)・G1
となります。
この式を変形すると
Z = G1・X - G1・Z・G2
Z + G1・Z・G2 = G1・X
Z( 1 + G1・G2 ) = G1・X
Z/X = G1/( 1 + G1・G2 )
となり、フィードバック系の伝達関数の式が得られます。
<Scilabでの表現>
G1・G2の伝達関数をそれぞれ
とした場合の変換後の伝達関数をScilabで求めます。
| コンソール画面 |
-->s=%s;
-->G1=(1+5*s+2*s^2)/(3+2*s+s^2);
-->G2=(5*(s+2))/(s+10);
-->G=G1/.G2 //← /. はフィイードバック用演算子
G =
2 3
10 + 51s + 25s + 2s
-------------------
2 3
40 + 78s + 57s + 11s
|
ブロック図の簡単化
下図のブロック線図全体の伝達関数を求めます。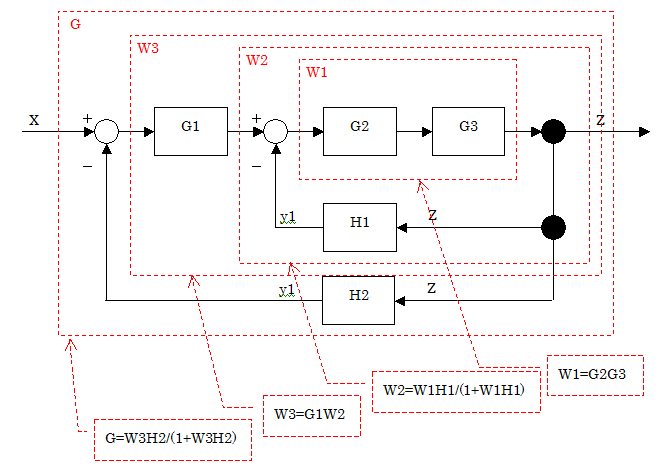
一気に計算してもいいのですが、分かりやすい様に途中結果W1〜W3を提示しながら求めます。
| コンソール画面 |
-->G1=1/(s+1);
-->G2=1/(s+10);
-->G3=(s+5)/(s^2+s+1);
-->H1=(s+2)/(s+3);
-->H2=1/(s+4);
-->W1=G2*G3 //←直列接続
W1 =
5 + s
-----------------
2 3
10 + 11s + 11s + s
-->W2=W1/.H1 //←フィードバック接続
W2 =
2
15 + 8s + s
-----------------------
2 3 4
40 + 50s + 45s + 14s + s
-->W3=G1*W2 //←直列接続
W3 =
2
15 + 8s + s
-----------------------------
2 3 4 5
40 + 90s + 95s + 59s + 15s + s
-->G=W3/.H2 //←フィードバック接続
G =
2 3
60 + 47s + 12s + s
----------------------------------------
2 3 4 5 6
175 + 408s + 471s + 331s + 119s + 19s + s
|