 |
はじめに
数学の準備
高校数学
複素数
ラプラス変換
ラプラス逆変換
Scilab入門
概要
四則演算
配列
グラフ表示
プログラム1
プログラム2
伝達関数
概要
 poly,syslin,csim
poly,syslin,csimステップ応答法
RLC回路
周波数応答
ゲイン・位相
ボード線図
比例・微分・積分
1次遅れ,ムダ時間
パデ近似の導出
pade関数の作成
制御の安定性
ブロック線図
フィードバック
2次遅れ系
ステップ応答法
周波数応答法
ナイキスト線図
安定性の判別
判別の仕組み
安定余裕の評価
評価の例題
Xcos
入門
例・運動方程式
PID制御(Xcos)
概要
比例(P)動作
積分(I)動作
微分(D)動作
PID・ボード線図
伝達関数:poly,syslin,csim
前ページでは、伝達関数*入力をラプラス逆変換し、求めた式を用いてグラフ表示させました。
ここでは、面倒な作業は、Scilab に任せ、伝達関数のみを使用してグラフ表示させます。
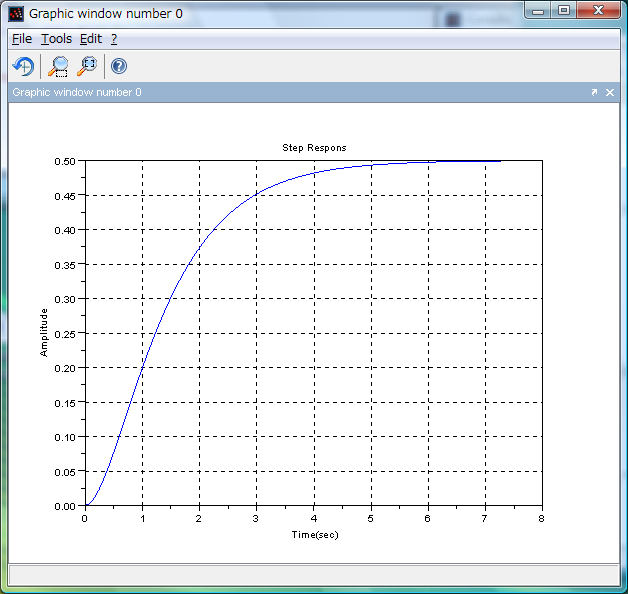
伝達関数から直接グラフ表示
| コンソール画面 |
-->t=linspace(0,8,100); //←時間変数 t へ 0〜8秒 を100分割した値の配列を設定
-->s=poly(0,'s'); //←多項式の変数 s を定義
-->G=1/(s^2+3*s+2); //←伝達関数 G を定義
-->sys=syslin('c',G); //←連続時間線形システムへ伝達関数 G を登録
-->y=csim('step',t,sys); //←伝達関数 G へステップ入力を与えた場合の出力変化を y に得る
-->plot(t,y) //←グラフ表示
-->xgrid() //←グリッドの表示
-->xtitle('Step Respons','Time(sec)','Amplitude') //←タイトル関連の表示
|
前ページと全く同じグラフが得られました。
poly()
poly は、多項式を定義するときに使います。| poly(0,'s') | s と言う文字をシンボリックに使うことを宣言 |
| poly([-1 2],'x') | 配列は、多項式の根 x の多項式で、 -1 と 2 の根を持つ式を取得 この場合 -2-x+x² が得られる |
| poly([1 2 3],'t','coeff) | 配列は多項式の係数 この場合 1+2t²+3t³ が得られる |
<実行例>
| コンソール画面 |
-->G=1/(s^2+3*s+2)
!--error 4 //←多項式の定義を試みたが s を定義していない為エラー発生
Undefined variable: s
-->s=poly(0,'s') //←多項式の変数 s を定義
s =
s
-->G=1/(s^2+3*s+2) //←今度は、多項式の定義に成功
G =
1
---------
2
2 + 3s + s |
| コンソール画面 |
-->f1=poly([-1 2],'x') //←根が -1 と 2 の多項式を求める
f1 =
2
- 2 - x + x //← -2-x+x^2 が得られた・・・(x-2)(x+1)
-->f2=poly([1 2 3],'x','coeff') //←係数が 1、2、3 の多項式を求める
f2 =
2
1 + 2x + 3x //← 1+2x+3x^2 が得られた
|
syslin()、csim()
syslinは、伝達関数の登録コマンドです。csimは、単位ステップ応答法の結果を出力するコマンドです。
| sys=syslin('c',G) | 連続時間線形システムへ、関数 G を登録 その線形システム上での関数 G を sys とする <第1パラメータ> 'c'=連続時間線形システム 'd'=離散時間線形システム |
| y=csim('step',t,sys) | 線形システムへ登録された関数 sys へステップ入力(
t秒 )を与えた場合の出力変化を y に得る <第1パラメータ> 'step'=ステップ応答法の結果を出力 'impuls'=インパルス応答法の結果を出力 |