 |
はじめに
数学の準備
高校数学
複素数
ラプラス変換
ラプラス逆変換
Scilab入門
概要
四則演算
配列
グラフ表示
プログラム1
プログラム2
伝達関数
概要
poly,syslin,csim
ステップ応答法
RLC回路
周波数応答
ゲイン・位相
ボード線図
比例・微分・積分
1次遅れ,ムダ時間
パデ近似の導出
pade関数の作成
制御の安定性
ブロック線図
フィードバック
 2次遅れ系
2次遅れ系ステップ応答法
周波数応答法
ナイキスト線図
安定性の判別
判別の仕組み
安定余裕の評価
評価の例題
Xcos
入門
例・運動方程式
PID制御(Xcos)
概要
比例(P)動作
積分(I)動作
微分(D)動作
PID・ボード線図
制御の安定性:2次遅れ系
2次遅れ要素で有用なものは1次遅れ要素を直列接続したものと、2次の振動計に大別されます。
1次遅れ要素の直列接続
1次遅れ要素の伝達関数は、1/(Ts+1) で表されました。これを直列接続するので
となります。
T = 1 とした場合のステップ応答を確認します。
| コンソール画面 |
-->t=linspace(0,8,100); //←時間変数 t へ 0〜8秒 を100分割した値の配列を設定
-->s=%s; //←多項式の変数 s を定義
-->G=1/(s+1)^2; //←1次遅れ系・直列接続例の伝達関数
-->sys=syslin('c',G); //←連続時間線形システムへ、関数 G を登録
-->y=csim('step',t,sys); //←sys へステップ入力( t秒 )を与えた場合の出力変化を y に得る
-->plot(t,y)
-->xgrid()
-->xtitle('Step Respons','Time(sec)','Amplitude')
|
<実行結果>
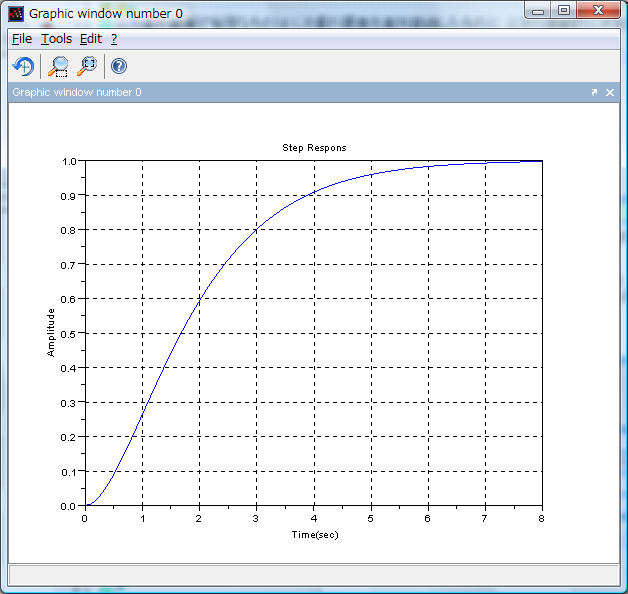
1次遅れ要素と比べ滑らかになりました。
S字曲線になっており、 t=0 においても微分可能で、1次遅れ要素とは異なります。
振動系
2次遅れ要素の振動系の伝達関数は、次式がよく使われます。
| ζ | 減衰係数 |
| ωm | 固有振動数 |
これを以前考察したRLC回路から考えます。
ステップ入力に対するCの電圧降下における伝達関数は、次のように求められました。
これを変形します。

とすると
| より |
同じく
| より |
RLC回路の場合へステップ信号を入力したときのCの電圧降下は
| が固有振動数 | が減衰係数 |
減衰係数ζは、特性方程式の根を決定する重要なパラメータとなり、システムの安定性関わります。
また、固有振動数ωn はシステムの即応性に関わるパラメータです。
2次遅れ要素(振動系)の特性根
2次遅れ要素(振動系)の特性根をその式から求めます。を解の公式で解くと

となります。
減衰係数の値によってステップ応答は次のような特徴を持ちます。
| ζ=0 | 無減衰 |
|
| ζ=1 | 臨界減衰 立上りが急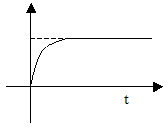 |
|
| ζ>1 | 過渡減衰 立上りが緩やか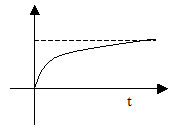 |
|
| 0<ζ<1 | 不足減衰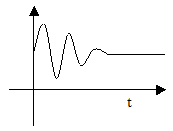 |