 |
はじめに
数学の準備
高校数学
複素数
ラプラス変換
ラプラス逆変換
Scilab入門
概要
四則演算
配列
グラフ表示
プログラム1
プログラム2
伝達関数
概要
poly,syslin,csim
ステップ応答法
RLC回路
周波数応答
ゲイン・位相
ボード線図
比例・微分・積分
1次遅れ,ムダ時間
パデ近似の導出
pade関数の作成
制御の安定性
ブロック線図
フィードバック
2次遅れ系
ステップ応答法
周波数応答法
ナイキスト線図
安定性の判別
判別の仕組み
安定余裕の評価
 評価の例題
評価の例題Xcos
入門
例・運動方程式
PID制御(Xcos)
概要
比例(P)動作
積分(I)動作
微分(D)動作
PID・ボード線図
制御の安定性:評価の例題
一巡伝達関数が、次式で与えられた時のゲイン余裕と位相余裕を求めていきます。
ナイキスト線図から
与えられた一巡伝達関数からナイキスト線図を描画し、その図の上にゲイン= 0dB の単円・補助線等を描きました。| コンソール画面 |
-->s=%s; //←多項式の変数 s を定義
-->G=15/(s^3+6*s^2+11*s+6); //←一巡伝達関数Gを定義
-->sys=syslin('c',G); //←連続時間線形システムへ一巡伝達関数Gを登録
-->nyquist(sys) //←ナイキスト線図の描画
|
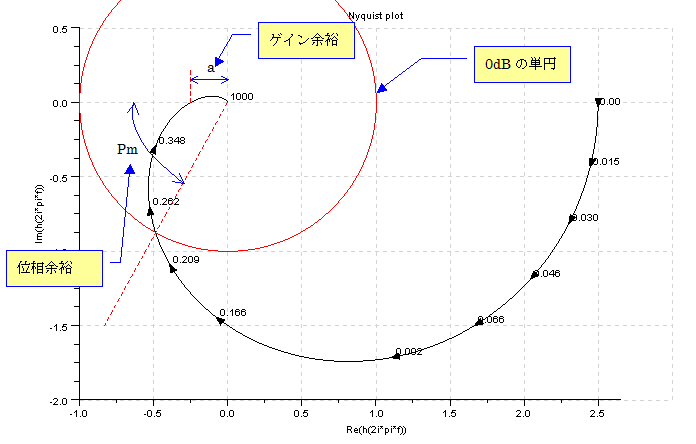
図から
a ≒ 0.25
Pm ≒ 60°
を得ることが出来ました。
| 安定余裕の評価 | |
| ゲイン余裕 | -20log(0.25) ≒12dB |
| 位相余裕 | ≒∠60° |
ボード線図から
同じくボード線図からも安定余裕を求めます。| コンソール画面 |
-->s=%s; //←多項式の変数 s を定義
-->G=15/(s^3+6*s^2+11*s+6); //←一巡伝達関数Gを定義
-->sys=syslin('c',G); //←連続時間線形システムへ一巡伝達関数Gを登録
-->bode(sys) //←ボード線図の描画
|
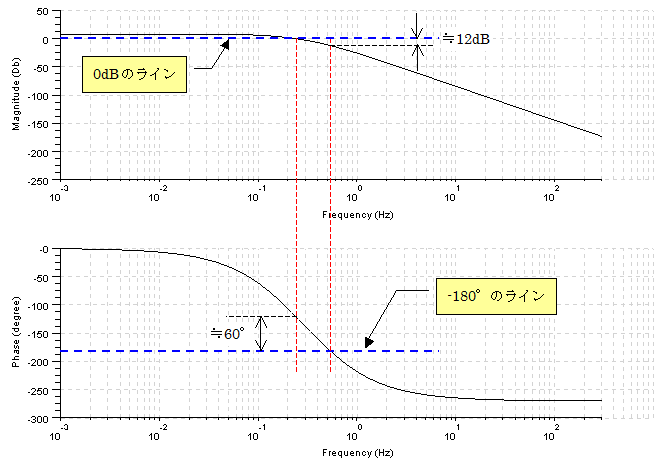
結果は、当然のことながらナイキスト線図で求めた結果とおなじになりました。
| 安定余裕の評価 | |
| ゲイン余裕 | ≒12dB |
| 位相余裕 | ≒∠60° |
Scilabの関数を使う
安定余裕を評価するために、ゲイン余裕と位相余裕を取得する関数が用意されています| コンソール画面 |
-->s=%s; //←多項式の変数 s を定義
-->G=15/(s^3+6*s^2+11*s+6); //←一巡伝達関数Gを定義
-->sys=syslin('c',G); //←連続時間線形システムへ一巡伝達関数Gを登録
-->g_margin(sys) //←マージン余裕取得関数
ans =
12.0412 //←マージン=12.0412
-->p_margin(sys) //←位相余裕取得関数
ans =
60.732136 //←位相余裕=60.732136°
|
| 安定余裕の評価 | |
| ゲイン余裕 | 12.0412dB |
| 位相余裕 | ∠60.732136° |
ナイキスト線図、ボード線図で得た結果は、かなり正確な値を得ていた事が分ります。