 |
はじめに
数学の準備
高校数学
複素数
ラプラス変換
ラプラス逆変換
Scilab入門
概要
四則演算
配列
グラフ表示
プログラム1
プログラム2
伝達関数
概要
poly,syslin,csim
ステップ応答法
RLC回路
周波数応答
ゲイン・位相
ボード線図
比例・微分・積分
1次遅れ,ムダ時間
パデ近似の導出
pade関数の作成
制御の安定性
ブロック線図
フィードバック
2次遅れ系
ステップ応答法
周波数応答法
ナイキスト線図
安定性の判別
判別の仕組み
 安定余裕の評価
安定余裕の評価評価の例題
Xcos
入門
例・運動方程式
PID制御(Xcos)
概要
比例(P)動作
積分(I)動作
微分(D)動作
PID・ボード線図
制御の安定性:安定余裕の評価
前節までで、フィードバック系の安定性を判別しました。
しかし、ぎりぎり安全なのか、余裕があるのか、安定の質までは分りませんでした。
安定余裕を定量的に評価する指標として位相余裕とゲイン余裕があります。
ここでは、その評価方法について述べます。
ナイキスト線図から安定余裕の評価
前節でナイキスト線図から安定性の判別を行いました。一巡伝達関数が安定なとき、フィードバック制御系が安定である条件(判別方法−2)は、ナイキスト線が (-1,j0) の左を通ることでした。
このことから、安定余裕を評価するためには (-1,j0) が基準となります。
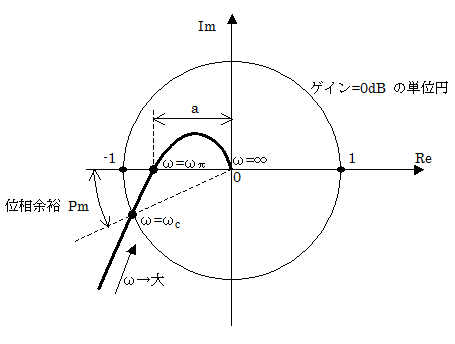
ナイキスト線が (-1,j0) から離れるには a が小さいほど、また角Pmが大きいほど良いことが分ります。
このaをゲイン余裕、Pmを位相余裕と呼びます。
ただし、a は安定時に正の値で表現したいため、逆数をとります。
| ゲイン余裕 | gm>0:安定 gm<0:不安定 gm=0:安定限界 |
|
| 位相余裕 | ∠Pm | 位相が180°反転するまでの余裕度 |
ボード線図から安定余裕の評価
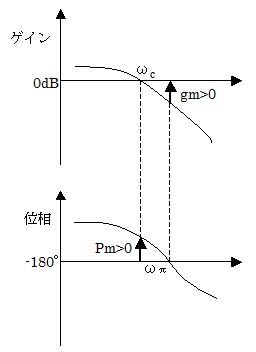
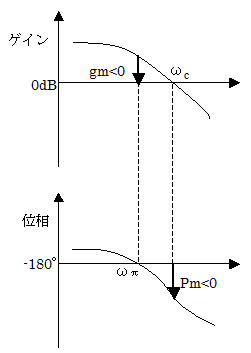
ゲイン余裕と位相余裕はボード線図からも求めることができます。ボード線図は右回転方向に考えるので、位相差はマイナスになります。
| 安定の場合 | 不安定の場合 |
 |
 |
| gm > 0 Pm > 0 |
gm < 0 Pm < 0 |
ωcがゲイン0dBと交差する各周波数で、ωπは位相差-180°の線と交差する周波数を示します。
<ゲイン余裕>
ωπのゲインを見て、0dBに向けて上向きの場合プラス、下向きの場合はマイナスとします。
gm > 0 ならば安定 gm < 0 ならば不安定になります。
<位相余裕>
ωc時の位相差を見て-180°から上向きの場合プラス、下向きの場合はマイナスとします。
Pm > 0 ならば安定 Pm < 0 ならば不安定になります。
ムダ時間要素を含んだときの安定性の評価
下図に示すムダ時間要素を含むフィードバックシステムのムダ時間と安定余裕に関して調べます。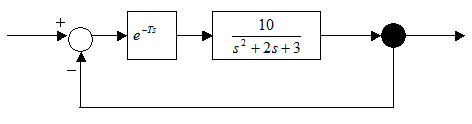
この一巡伝達関数は次式になります。
ムダ時間(T)を 0.1、0.218、0.5にしたときのナイキスト線図を描画します。
ムダ時間要素は、無理関数です。
パデ近似を使って有理化しています。
| コンソール画面 |
-->getf('pade.sci') //←pade.sciファイルに定義(pade)した関数の使用宣言
-->t=[0.1 0.218 0.5]; //←ムダ時間の定義
-->s=%s; //←多項式の変数 s を定義
-->G=10/(s^2+2*s+3); //←一巡伝達関数のムダ時間意外の定義
-->for i=1:3 do //←ムダ時間数ループ
--> [num,den]=pade(t(i),4) ; //ムダ時間をパデ近似で作成
--> P=(num(1)+num(2)*s+num(3)*s^2+num(4)*s^3+num(5)*s^4)...
--> /(den(1)+den(2)*s+den(3)*s^2+den(4)*s^3+den(5)*s^4); //←パデ近似をsの多項式に変換(長いので2行に分割)
--> sys=syslin('c',G*P); //←連続時間線形システムへ一巡伝達関数G(s)H(s)を登録
--> nyquist(sys); //←ナイキスト線図の描画
-->end
|
<実行結果>
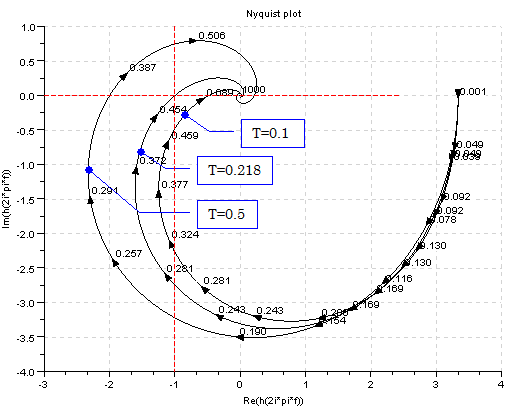
| ムダ時間(Sec) | ナイキスト線は点(-1,j0)に対して | 安定性 |
| 0.1 | 右側 | 安定 |
| 0.218 | 点上 | 安定限界 |
| 0.5 | 左側 | 不安定 |
このように、ムダ時間要素はシステムの安定性に大きく影響します。