 |
はじめに
数学の準備
高校数学
複素数
ラプラス変換
ラプラス逆変換
Scilab入門
概要
四則演算
配列
グラフ表示
プログラム1
プログラム2
伝達関数
概要
poly,syslin,csim
ステップ応答法
RLC回路
周波数応答
ゲイン・位相
ボード線図
比例・微分・積分
1次遅れ,ムダ時間
パデ近似の導出
pade関数の作成
制御の安定性
ブロック線図
 フィードバック
フィードバック2次遅れ系
ステップ応答法
周波数応答法
ナイキスト線図
安定性の判別
判別の仕組み
安定余裕の評価
評価の例題
Xcos
入門
例・運動方程式
PID制御(Xcos)
概要
比例(P)動作
積分(I)動作
微分(D)動作
PID・ボード線図
制御の安定性:フィードバック
フィードバック制御の目的は、ある値を目標値に保つことです。
その目的を達成するためには、制御系が安定している必要があります。
安定性を評価する手法について解説していきます。
安定性評価・解法−1
下図のフィードバックの安定性について考えます。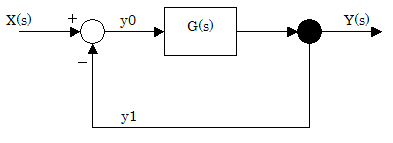 |
| ↓ 等価 |
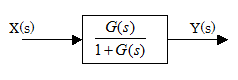 |
入力と出力の関係は、次式で示されます(参照)。
例として次式の伝達関数を持つフィードバック系の安定性をステップ応答で考えます。
ステップ入力をラプラス変換すると 1/s になります。
出力Y(s)は
となります。
ラプラス逆変換をし易いように部分分数展開を行います。
ここで、
なので、α・β・γは次のように求められます。
求めたα・β・γを代入すれば次式が得られます。
得られた式をラプラス逆変換します。
この式について t→∞ にした場合、
となります。
これから、長い時間経過後は、定常値 = 1に落ち着くことが分かります。
したがって、このシステムは安定である考えられます。
解法−2
伝達関数の分母を 0 とおいた方程式を特性方程式と言い、その解を特性根と言います。この特性根が、全てマイナスであればそのシステムは、安定しています。
前節の例で調べます。
伝達関数は次式で与えられました。
分母は、
なので、
を解きます。
sの解は、全てマイナスなのでこのシステムは安定しています。
| sの解 | ラプラス逆変換 | |
| マイナス | e-Xt | 指数部にマイナス値をとるので、時間が十分長くなれば、0 に落ち着く(安定)。 |
| 0 | e0 | 1 固定なので、発振 |
| プラス | et | 無限に大きくなるので発散 |
Scilabでの確認
前節の結果をグラフ化して確認します。| コンソール画面 |
-->t=linspace(0,30,100); //←時間変数 t へ 0〜30秒 を100分割した値の配列を設定
-->s=%s; //←多項式の変数 s を定義
-->G=1/(6*s^2+5*s+1); //←例(フィードバック)の伝達関数
-->sys=syslin('c',G); //←連続時間線形システムへ、関数 G を登録
-->y=csim('step',t,sys); //←sys へステップ入力( t秒 )を与えた場合の出力変化を y に得る
-->plot(t,y)
-->xgrid()
-->xtitle('Step Respons','Time(sec)','Amplitude')
|
<実行結果>
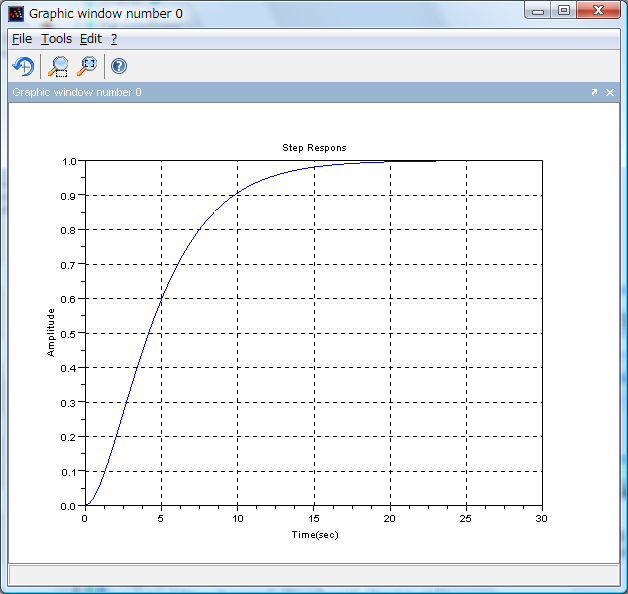
時間経過とともに 1.0 へ限りなく近付いているのが分かります。