 |
はじめに
数学の準備
高校数学
複素数
ラプラス変換
ラプラス逆変換
Scilab入門
概要
四則演算
配列
グラフ表示
プログラム1
プログラム2
伝達関数
概要
poly,syslin,csim
ステップ応答法
RLC回路
周波数応答
ゲイン・位相
ボード線図
比例・微分・積分
1次遅れ,ムダ時間
パデ近似の導出
pade関数の作成
制御の安定性
ブロック線図
フィードバック
2次遅れ系
ステップ応答法
周波数応答法
ナイキスト線図
安定性の判別
判別の仕組み
安定余裕の評価
評価の例題
Xcos
入門
例・運動方程式
PID制御(Xcos)
概要
比例(P)動作
積分(I)動作
 微分(D)動作
微分(D)動作PID・ボード線図
PID制御(Xcos):微分(D)動作
微分動作の詳細を見ます。
特徴
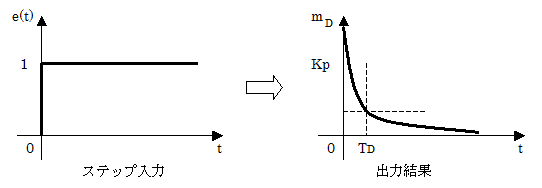
微分動作は、次式で表されます。入力に単位ステップを与えた場合下図に示します。
ステップ信号の立上りのとき出力は最大となりその後0へ近付きます。
つまり、急激な入力変化の時に出力も大きく変化します。
 |
| 微分動作 |
比例(P)動作における出力と、微分(D)動作の出力が等しくなる時間を微分時間(TD)と言います。
式からも分かるように微分時間(TD)が長いほど修正量が強く働きます。
PID(比例+積分+微分)動作
PID 調整器の操作量は、
で表されます。
この式をラプラス変換すると次式になります。

これをブロック線図にすると下図になります(参考)。

積分・微分動作を含んだ場合のオフセット値を見ます。
PV(s) の式は、
で求まります。
十分長い時間経過後の式を最終定理を用いて導きだします。

| <最終値の定理> t→∞ における値は、s を掛けてからs→0としたものと等しい |
したがって、オフセットは 0 となります。
PID制御の例
下図のようなPI制御差れている系に単位ステップを入力します。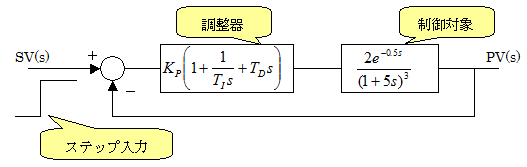
制御対象を3次系にしているのは、PI動作とPID動作の違いがはっきりと出すためです。
今回は、ムダ時間=0.5Secとしてをパデ近似で求めます
<パデ近似の設定>
| コンソール画面 |
-->s=%s; //←多項式の変数 s を定義
-->exec('pade_s.sci'); //←pade_s関数の使用を宣言(関数が記述されているファイル名を指定)
-->[num,den]=pade_s(0.5,4) //パデ近似の分子・分母を s の多項式で取得
den =
26880 + 6720s + 720s + 40s + s
num =
26880 - 6720s + 720s - 40s + s
|
<ブロック線図>
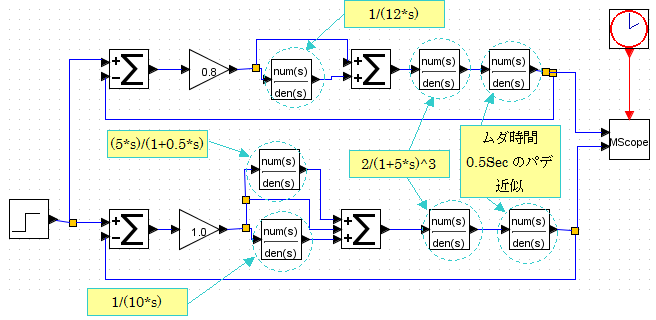
各伝達関数は、黄四角で提示した式を設定しています。
上側のブロックがPI 制御、下側のブロックはPID 制御です。
<実行結果>
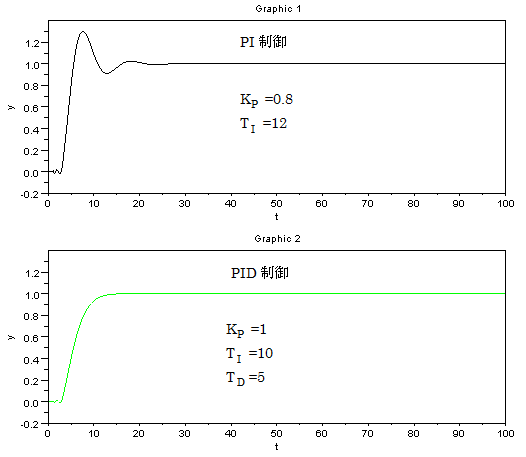
PI制御ではハンチングが発生しており、これ以上 Kp を大きくするのは無理があります。
微分動作を加えることにより、ハンチングを抑えることが出来ます。
結果、Kp も大きくすることが出来、応答性の向上も計れます。
なお、微分要素には不完全微分を使用しています。
これは、微分に1次遅れ要素を加え、高周波成分を取り除いた式です。
| 不完全微分= |
外乱の影響
下図のようなPI 動作と PID 動作の系に対する外乱の影響を見ます。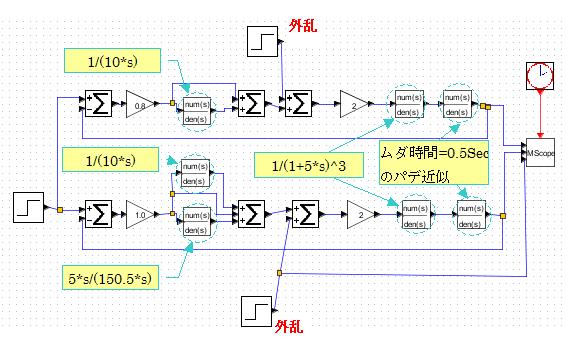
外乱として、ステップ時間=150Sec、 大きさ0.5 のステップ信号を与えました
<実行結果>
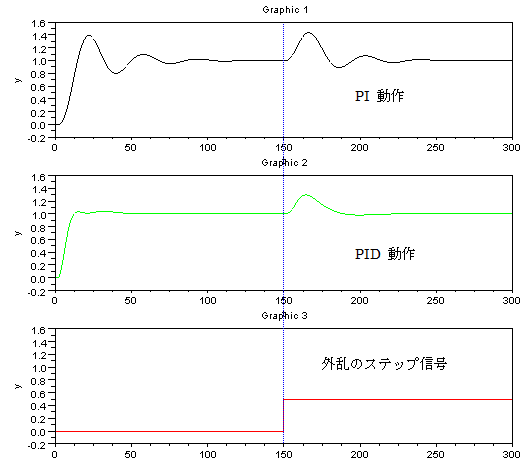
外乱に対しても、PID 動作が優れていることが分ります。