 |
はじめに
数学の準備
高校数学
複素数
ラプラス変換
ラプラス逆変換
Scilab入門
概要
四則演算
配列
グラフ表示
プログラム1
プログラム2
伝達関数
概要
poly,syslin,csim
 ステップ応答法
ステップ応答法RLC回路
周波数応答
ゲイン・位相
ボード線図
比例・微分・積分
1次遅れ,ムダ時間
パデ近似の導出
pade関数の作成
制御の安定性
ブロック線図
フィードバック
2次遅れ系
ステップ応答法
周波数応答法
ナイキスト線図
安定性の判別
判別の仕組み
安定余裕の評価
評価の例題
Xcos
入門
例・運動方程式
PID制御(Xcos)
概要
比例(P)動作
積分(I)動作
微分(D)動作
PID・ボード線図
伝達関数:ステップ応答法
代表的な制御要素であるステップ応答の特性を見ていきます。
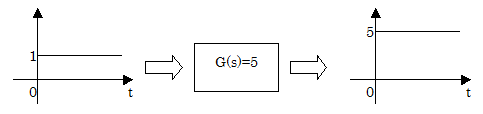
比例要素
伝達関数が次式で表されるものを比例要素と言います。G(s) = K
Kは比例定数と言います。
微分要素
伝達関数が次式で表されるものを比例要素と言います。G(s) = Ts
しかし、この要素実現することは、事実上不可能です。
(ステップ入力の 0→1 変化が 0秒、つまり微分すると無限大になるため)
そこで、近似的に次式を利用します。
| コンソール画面 |
-->t=linspace(0,8,100); //←時間変数 t へ 0〜8秒 を100分割した値の配列を設定
-->step=linspace(1,1,100); //←ステップ入力値・・・tと同じ要素数分の 1 を用意
-->s=poly(0,'s'); //←多項式の変数 s を定義
-->G=s/(s+1) //←近似微分要素の伝達関数
G =
s
-----
1 + s
-->sys=syslin('c',G) //←連続時間線形システムへ、関数 G を登録
sys =
s
-----
1 + s
-->y=csim(step,t,sys); //←sys へステップ入力( t秒 )を与えた場合の出力変化を y に得る
-->plot(t,y)
-->xgrid()
-->xtitle('Step Respons','Time(sec)','Amplitude')
|
<実行結果>
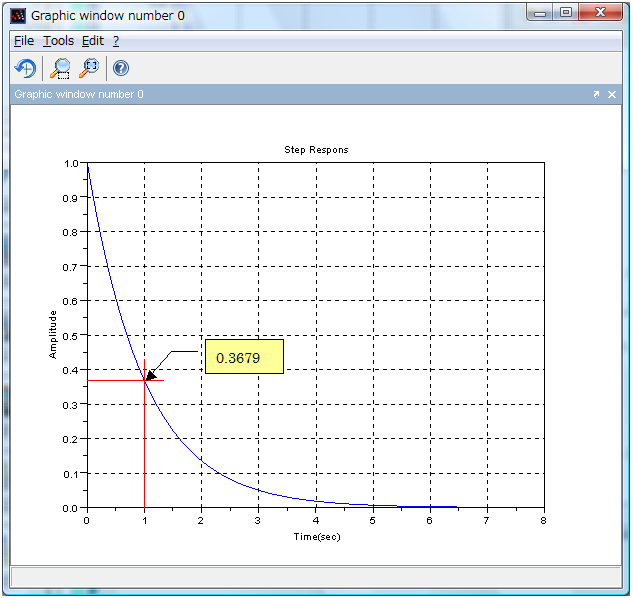
Y(s) を出力、X(s) をステップ入力とすると次の式が成り立ちます。
これをラプラス逆変換してy(t)を求めます。
この式からも分かるように、t=T のとき 1/e となり 0.3679 が得られます。
単位ステップ入力に対して 0.3679 の出力になる T を時定数と言います。
| 注 意 |
| 最初、ステップ応答を見るために csim('step',t,sys)
として、第一パラメータに 'step' の文字列を与えて確認しました。 しかし、結果は 0 → -1.0 のグラフになりました。 1.0 → 0 の表示にどうしても出来なかったので、step と言う配列にx軸個の1を用意して、それをステップ入力としました。 もっとスマートな方法があると思いますが、ヨッパな私には分かりませんでした。 もし、ご存知の方が居られましたら、ご教授願いますm(_~_)m |
積分要素
伝達関数が次式で表されるものを積分要素と言います。T=1 のときのステップ応答を Scilab でシミュレーションさせます。
| コンソール画面 |
-->t=linspace(0,8,100); //←時間変数 t へ 0〜8秒 を100分割した値の配列を設定
-->G=1/s //←積分要素の伝達関数
G =
1
-
s
-->sys=syslin('c',G) //←連続時間線形システムへ、関数 G を登録
sys =
1
-
s
-->y=csim('step',t,sys); //←sys へステップ入力( t秒 )を与えた場合の出力変化を y に得る
-->plot(t,y)
-->xgrid()
-->xtitle('Step Respons','Time(sec)','Amplitude')
|
<実行結果>
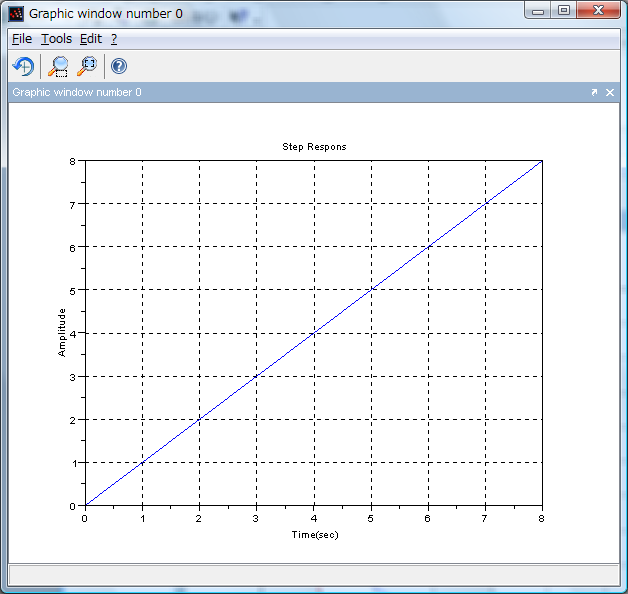
Y(s) を出力、X(s) をステップ入力とすると次の式が成り立ちます。
これをラプラス逆変換してy(t)を求めます。
t=T で出力が 1 になることが分かります。
1次遅れ要素
伝達関数が次式で表されるものを1次遅れ要素と言います。この系では言葉通り、位相が送れて出力されます。
T=1 のときのステップ応答を Scilab でシミュレーションさせます。
| コンソール画面 |
-->t=linspace(0,8,100); //←時間変数 t へ 0〜8秒 を100分割した値の配列を設定
-->s=poly(0,'s'); //←多項式の変数 s を定義
-->G=1/(s+1); //←積分要素の伝達関数
-->sys=syslin('c',G) //←連続時間線形システムへ、関数 G を登録
sys =
1
-----
1 + s
-->y=csim('step',t,sys); //←sys へステップ入力( t秒 )を与えた場合の出力変化を y に得る
-->plot(t,y)
-->xgrid()
-->xtitle('Step Respons','Time(sec)','Amplitude')
|
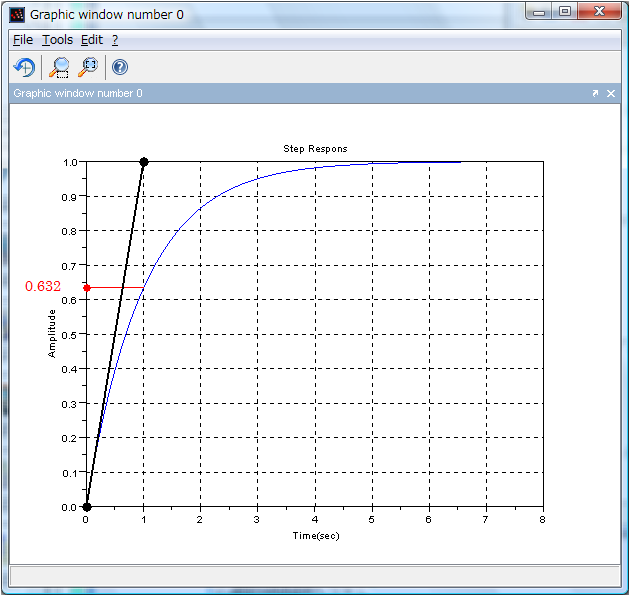
Y(s) を出力、X(s) をステップ入力とすると次の式が成り立ちます。
ラプラス逆変換を行っていきます。

得られた式で t=T のとき y(t)=0.632 になります。
このときの T の時間を時定数と呼びます。
また、原点における接線が定常値と交わる時間でもあります。